Publicado originalmente pelo editor de Novo Milênio no caderno Informática do jornal A Tribuna de Santos, em 4/5/1999. Última modificação em (mês/dia/ano/horário): 01/07/00 14:13:01 |
| EMMY
Autômato foi construído na Unisanta Para ilustrar sua tese de doutorado, aprovada com distinção e louvor pela banca examinadora (de que participou também o próprio Newton Carneiro da Costa), o professor Inácio apresentou um robô móvel elaborado com base na Lógica Paraconsistente. O projeto, denominado Robô Móvel Emmy (em homenagem a Emmy Noether, eminente cientista com importantes contribuições no campo da Lógica Matemática), foi construído por quatro alunos da Faculdade de Engenharia Eletrônica da Unisanta. Desde 11/1998, os alunos Cláudio Rodrigo Torres, Danilo de Mendonça Salles, Israel João Júnior e Alexandre César iniciaram os estudos e a construção de Emmy. Após uma palestra do professor João Inácio, os universitários resolveram mergulhar de cabeça na Lógica da Contradição. "Nós levamos a tese de doutorado do professor para casa e começamos a estudar a Lógica da Contradição. Não foi difícil assimilar o conceito, pois a tese estava muito bem escrita", afirmou Cláudio. Todos os componentes do grupo residem na região do ABCD paulista. Por trabalharem durante o dia e estudarem à noite, decidiram renunciar às férias e aos finais de semana para desenvolver o projeto. "Os alunos de cursos noturnos às vezes são rotulados de fracos, pois não têm tempo para se dedicar aos estudos. Mas este trabalho prova que o interesse independe da carga horária de aulas. Encaramos esse desafio como se fosse uma tarefa solicitada pela indústria em que trabalho", afirmaram. A montagem em módulos sobrepostos, separados por função, permite um estudo didático e a visualização da ação de cada parte no controle de movimentação do robô. Emmy tem 60 cm de altura e está montado numa plataforma móvel de alumínio de formato circular, com 30 cm de diâmetro. Além das placas de circuitos eletrônicos e dos sensores, possui baterias de alimentação, motores e rodas. 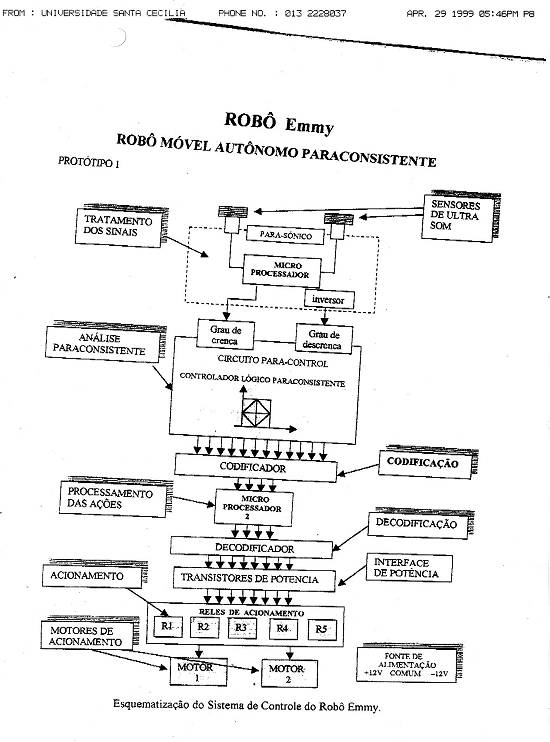 "Na aplicação do controle clássico em Robótica, o tratamento de situações que fogem àquelas convencionais consume um tempo muito longo para ser processado, provocando lentidão nas respostas do robô, diminuindo assim a capacidade de reação e em muitas vezes provocando o desligamento do controle". Porém, no projeto do professor João Inácio, o sistema de controle de deslocamento do robô funciona justamente com conceitos de inconsistência. Um Controlador Lógico Paraconsistente (CLP), construído em hardware, recebe e faz o tratamento de sinais elétricos. As informações sobre a existência ou não de obstáculos na trajetória do robô são obtidas por dois sensores de ultra-som (conhecidos como dispositivos para-sônicos), que fazem o papel do olho humano. Esses dispositivos são controlados por um circuito especial microprocessado que converte a distância de Emmy ao obstáculo em dois valores de tensão elétrica. As amplitudes dos sinais de tensão elétrica são relacionadas proporcionalmente com as distâncias correspondentes entre o robô e os obstáculos. Para o CLP, os sinais de tensão são considerados como graus de crença e descrença. Após equacionados, os sinais recebem um tratamento conforme a Lógica Paraconsistente, que os transforma em palavras binárias compostas por 12 dígitos, que seriam as doze possibilidades de trabalho do robô.  Ele observa que a Lógica Paraconsistente pode ter aplicações bem variadas, além de áreas como a Robótica, a Inteligência Artificial e as Redes Neurais. Na computação, por exemplo, um sistema especialista de suporte a diagnósticos médicos processaria dados contraditórios sobre as condições de saúde de um paciente, quando é impossível verificar qual deles é o verdadeiro. |